上海埃飞科技
Worldwide Technology(S. H)上海埃飞科技
Worldwide Technology(S. H)产品展示




卫星剩磁测试系统
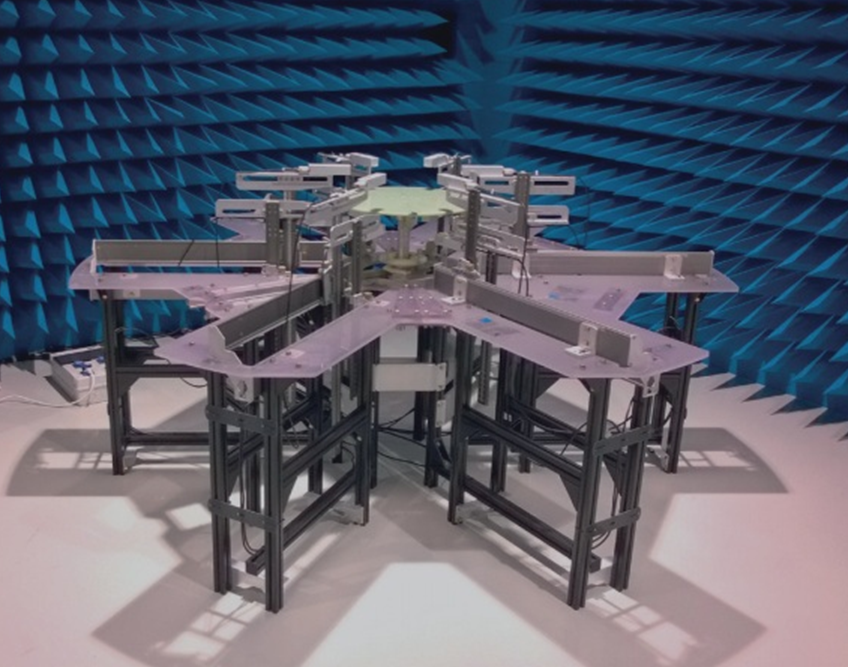
卫星剩磁测试系统Snapshot-MMF 是一款专为空间部门设计的卫星有效载荷或航天器元器件磁场测量的设备,使用多个固定磁力计进行高精度测量,被测备 (EUT) 产生的磁场,用于磁性清洁应用。Snapshot-MMF 是在对各种可能的多磁力计布置进行深入研究后设计的,考虑磁力计的Z佳数量及其相对位置,为了实现快速的测量时间和Z大的测量重复性。该设施消除了在测量过程中使用亥姆霍兹线圈来消除地球磁场的情况。
产品介绍
卫星剩磁测试系统Snapshot-MMF 是一款专为空间部门设计的卫星有效载荷或航天器元器件磁场测量的设备,使用多个固定磁力计进行高精度测量,被测备 (EUT) 产生的磁场,用于磁性清洁应用。Snapshot-MMF 是在对各种可能的多磁力计布置进行深入研究后设计的,考虑磁力计的Z佳数量及其相对位置,为了实现快速的测量时间和Z大的测量重复性。该设施消除了在测量过程中使用亥姆霍兹线圈来消除地球磁场的情况。
产品特点
•磁强计的径向和垂直调整
• EUT垂直调整
•软件引导的顺序(分步)测量程序
•基于软件的测量
•采集、数据过滤和报告
•EUT磁信号总计
•测量时间~1分钟(总时间包括背景场测量)
•避免环境磁场变化的影响
产品应用
Snapshot-MMF已被使用欧洲航天局 -欧洲空间研究与技术中心 (ESA/ESTEC) 执行电子EUT和磁偶极子建模的准确测量,对航天器磁清洁度等应用非常有用。该设施的主要应用是获得 EUT 的“磁签名”。测量区域称为“磁清洁度”,适用于航天器单元(服务模块或有效载荷);大多数太空任务对磁清洁都有严格的要求。该设施可用于直流和交流磁场测量,交流测量的频率范围高达50 kHz,可以为直流测量提供测试计划。
测量方案
Snapshot-MMF 是一种用于磁性清洁度测量的解决方案。使用Snapshot-MMF,用户可以使用三步过程测量来自被测设备EUT 的总直流磁场,而无需使用 3D 亥姆霍兹线圈;
第一步:测量环境场(包括地球场); B(环境,之前)
第二步:测试工程师将 EUT 放置在设施的中间并测量现在为 B(EUT+Ambient)的磁场
第三步:再次测量环境场(包括地球场); B(环境,之后)
那么总的 EUT 直流磁场为 B(EUT+Ambient) – (B(ambient, after) + B (ambient, before))/2。
应尽可能快地进行测量,以减少地球磁场变化的影响。通常,对于小型 EUT,可以在 30 秒内完成测量。对于结构复杂需要更多时间放置在Snapshot-MMF 转盘上的较大 EUT,时间可能会增加。
测量数据可以提供给 MDM 求解器,以表示具有多个偶极子的 EUT,以进行进一步模拟(即在系统级)。求解器将测量数据集拟合到代表 EUT 磁行为的多个偶极子。
产品规格
测量元件
磁力计 12 个
类型 磁通门
品牌 巴丁顿Mag03 MS系列
范围 70 or 100μΤ
电源装置 2xBartington PSU1
1xBartington deca PSU
数据采集 NI6289 USB数据采集卡
解析度 18 位
软件应用 图形用户界面
测量配置
数据采集和处理
解算器接口
测量数据报告
因用于机器人各方面应用且与大多数机器人类型兼容,AutoCal系统可以检测出机器人自身构造和工具中心点(TCP)的 突然改变或偏离,并且该系统无需人为干涉就自动地更正这些误差。
AutoCal系统-Dynalog的先进水平校准技术,Dynalog是机器人单元标定技术的世界领导者。它的主流产品DynaCal 系统,被应用于离线的机器人单元校准,并作为最精确的和技术先进的机器人校准程序为许多机器人制造商和终端使用者所接受。AutoCal 系统将已证实的DynaCal校准技术结合到一个在线的全自动系统中,该系统专为程序控制和复原而设计的,价格低廉。
AutoCal系统提供在线的机器人校准方案,旨在快速和自动地保证机械设备的工作性能。因用于机器人各方面应用且与大多数机器人类型兼容,AutoCal系统可以检测出机器人自身构造和工具中心点(TCP)的 突然改变或偏离,并且该系统无需人为干涉就自动地更正这些误差。这意味着不用猜测哪里会出错,不用浪费宝贵时间在机器人程序重复校准上,产品品质无任何损失。
AutoCal系统-Dynalog的先进水平校准技术,Dynalog是机器人单元标定技术的世界领导者。它的主流产品DynaCal 系统,被应用于离线的机器人单元校准,并作为最精确的和技术先进的机器人校准程序为许多机器人制造商和终端使用者所接受。AutoCal 系统将已证实的DynaCal校准技术结合到一个在线的全自动系统中,该系统专为程序控制和复原而设计的,价格低廉。